

Описание систем управления беспилотными летательными аппаратами
• Расширение зоны устойчивого захвата излучения объекта связи за счет применения дискретного алгоритма пространственного сканирования с детерминированной пространственно-временной структурой.
• Переход в режим устойчивого автосопровождения объекта связи системой АСН при обнаружении объекта связи.
• Обеспечение возможности повторного вхождения в связь в случае ее срыва. Для дискретного алгоритма пространственного сканирования с детерминированной пространственно-временной структурой можно выделить следующие особенности:
• Сканирование ДН АС осуществляется дискретно во времени и в пространстве. • Пространственные перемещения ДН АС при сканировании осуществляются таким образом, чтобы не оставалось пространственных зон, которые не перекрываются зоной уверенного захвата система АСН за весь цикл сканирования (см. рис.2).
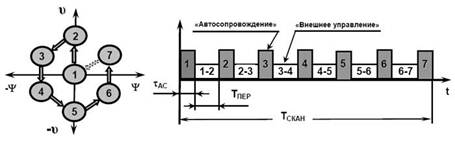
Рис.2. Пример организации дискретного пространственного сканирования в азимутальной и угломестной плоскостях
Для каждого конкретного пространственного положения, определяемого алгоритмом сканирования, можно выделить две фазы: «Автосопровождение» и «Внешнее управление».
• В фазе «Автосопровождение» система АСН осуществляет оценку возможности приема излучения объекта связи для выбранного пространственного положения РСН.
В случае положительного результата оценки: Пространственное сканирование прекращается. Система АСН продолжает осуществлять автосопровождение излучения объекта связи по своему внутреннему алгоритму. На вход сервопривода АС поступают сигналы пространственной ориентации АС по данным текущего пеленга объекта связи от системы АСН XАСН(t). В случае отрицательного результата оценки: Осуществляется пространственное перемещение РСН АС в следующее пространственное положение, определяемое алгоритмом сканирования.
• В фазе «Внешнее управление» на выходе процессора управления антенной системой формируются сигналы управления сервоприводом АС. Компоненты сигнала управления сервоприводом обеспечивают:
X0 – первоначальную пространственную ориентацию ДН АС в направлении на объект связи; ∆XЛА(t)–парирование пространственных эволюций летательного аппарата; XАЛГ(t) – расширение зоны устойчивого захвата излучения объекта связи системы АСН в соответствии с дискретным алгоритмом пространственного сканирования с детерминированной пространственно-временной структурой.
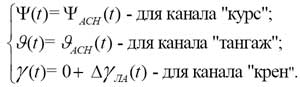
В случае срыва связи, начиная с момента времени ТСВ=0 (пропадание сигнала «СВЯЗЬ»), сигнал XАСН(ТСВ=0) запоминается в устройстве «Вычисления и хранения», и используется в дальнейшем процессором управления АС в качестве значения ожидаемого пеленга объекта связи. Процесс вхождения в связь повторяется как описано выше. В режиме «Внешнее управление» сигнал управления сервоприводом остронаправленной АС по каналам «курс», «тангаж» и «крен» может быть записан
 (1)
(1)
В режиме «Автосопровождение» сигнал управления сервоприводом остронаправленной АС может быть записан
 (2)
(2)
Конкретный вид сигналов управления определяется конструктивными особенностями сервопривода антенной системы.
Инерциальная система БЛА
Ключевым моментом в упомянутой цепочке является «измерение состояния системы».То есть координат местоположения, скорости, высоты, вертикальной скорости, углов ориентации, а также угловых скоростей и ускорений. В бортовом комплексе навигации и управления, разработанном и производимым ООО «ТеКнол», функцию измерения состояния системы выполняет малогабаритная инерциальная интегрированная система (МИНС). Имея в своем составе триады инерциальных датчиков микромеханических гироскопов и акселерометоров), а также барометрический высотомер и трехосный магнитометр, и комплексируя данные этих датчиков с данными приемника GPS, система вырабатывает полное навигационное решение по координатам и углам ориентации. МИНС разработки ТеКнола – это полная Инерциальная система, в которой реализован алгоритм бесплатформенной ИНС, интегрированной с приемником системы спутниковой навигации. Именно в этой системе содержится «секрет» работы всего комплекса управления БЛА. По сути, одновременно работают три навигационных системы в одном вычислителе по одним и тем же данным. Мы их называем «платформами». Каждая из платформ реализует свои принципы управления, имея свои «правильные» частоты (низкие или высокие). Мастер-фильтр выбирает оптимальное решение с любой из трех платформ в зависимости от характера движения. Этим обеспечивается устойчивость системы не только в прямолинейном движении, но и при виражах, некоординированных разворотах, боковом порывистом ветре. Система никогда не теряет горизонт, чем обеспечиваются правильные реакции автопилота на внешние возмущения и адекватное распределение воздействий между органами управления БЛА.
Интересные статьи:
Модель Большого взрыва и расширяющейся Вселенной
Введение
Одной из основных концепций современного естествознания является учение о Вселенной как едином целом и обо всей охваченной астрономическими наблюдениями области Вселенной (Метагалактике) как части целого – космология.
Выводы ко ...
Метеорные явления в земной атмосфере
Явление падения метеорных тел известно людям с незапамятных времён. Не имея возможности верно их описывать, люди приписывали этим явлениям мистические свойства. В старые времена падение метеора воспринималось как падение звезды. Считалось ...
Солнечная система и Земля
Введение
Вот уже два века проблема происхождения Солнечной системы волнует выдающихся мыслителей нашей планеты. Этой проблемой занималась, начиная от философа Канта и математика Лапласа, плеяда астрономов и физиков XIX и XX столетий. Ей о ...